根据 ## 一、整体架构与各部分关联概述
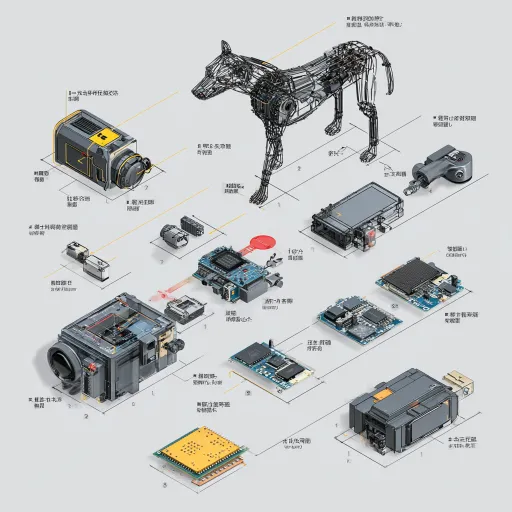
提示词:According to ## I. Overview of Overall Architecture and Connections Design, the preparation design drawings of the infrared night vision machine dog are outlined, where various components cooperate with each other to form a complete intelligent machine system. The chip is responsible for data processing, control, and communication; accessories provide physical support, power supply, and display functions for the system; sensors are used to perceive the external environment and the machine dog's own status; and motors drive the movement joints of the machine dog to achieve various actions. Below are detailed descriptions of the linking schemes for each part. ### II. Linking Schemes for the Chip with Accessories, Sensors, and Motors #### (1) Infrared Detector Chip - **Linkage with Lens**: The lens focuses infrared rays onto the infrared detector chip, and both are closely connected via a mechanical structure to ensure accurate projection of light onto the chip's photosensitive area. - **Linkage with Processor Chip**: Once the infrared detector chip converts the sensed infrared radiation into electrical signals, it transmits them to the processor chip for processing through high-speed data transmission lines (such as differential signal lines). - **Potential Linkage with Display**: If there is a need to directly display the raw or preliminarily processed infrared images, the infrared detector chip can connect with the display via a video transmission interface (such as MIPI interface), but usually, the images after processing by the processor chip are sent to the display. #### (2) Processor Chip - **Linkage with Power Management Chip**: The power management chip provides stable operating voltage to the processor chip, and they are connected through power lines. Meanwhile, the processor chip can set parameters and monitor the state of the power management chip through control lines. - **Linkage with Communication Chip**: The processor chip connects with the communication chip through communication interfaces (such as SPI, I2C, etc.) to achieve data transmission and reception, allowing the machine dog to communicate with other devices. - **Linkage with Sensors**: The processor chip connects with various sensors (infrared sensor, temperature sensor, distance sensor) through a data bus (such as CAN bus, UART, etc.), receiving data collected by the sensors for analysis and processing. - **Linkage with Motors**: The processor chip connects with the motor through a motor driver circuit, sending control signals to the motor based on sensor data and preset algorithms to drive the motor, realizing the limb movements of the machine dog. #### (3) Power Management Chip - **Linkage with Power Supply**: The input port of the power management chip connects with the power supply (such as lithium battery), converting and regulating the output voltage to provide appropriate working voltage to other chips and components. - **Linkage with Other Chips and Components**: Through power lines, it provides stable power supply to infrared detector chip, processor chip, communication chip, sensors, motors, and others. #### (4) Communication Chip - **Linkage with External Devices**: The communication chip (such as Bluetooth communication chip CC2540) communicates with external devices (such as mobile phones, computers, etc.) through wireless signals, enabling data transmission and interaction. - **Linkage with Processor Chip**: It connects with the processor chip through communication interfaces, receiving data sent from the processor chip and sending it to external devices while relaying data sent from external devices back to the processor chip. ### III. Limb Movement Joint Name Linking Sensor Preparation Scheme #### (1) Limb Movement Joint Names - **Shoulder Joint**: Located at the connection between the machine dog's forelimb and body, responsible for the up-and-down and forward-backward swinging of the forelimb. - **Elbow Joint**: Positioned in the middle of the forelimb, controlling the flexion and extension of the forelimb. - **Hip Joint**: Connects the machine dog's hind limb and body, enabling up-and-down and forward-backward movement of the hind limb. - **Knee Joint**: Located in the middle of the hind limb, controlling the flexion and extension of the hind limb. #### (2) Links Between Joints and Sensors - **Shoulder Joint** - **Temperature Sensor**: Installed near the motor of the shoulder joint, in close contact with the motor through thermally conductive materials to monitor the motor's temperature in real time. The temperature sensor connects to the processor chip via a signal line, and when the temperature exceeds a set threshold, the processor chip can take corresponding measures (such as reducing motor power) for overheating protection. - **Distance Sensor**: Mounted on the outer side of the shoulder joint to detect the distance of objects around the shoulder. The distance sensor connects to the processor chip via a data bus, providing environmental information for the machine dog's motion planning to avoid collisions with surrounding objects. - **Elbow Joint** - **Infrared Sensor**: Installed on the inner side of the elbow joint, capable of detecting infrared light emitted by objects in front of the elbow to determine if the elbow is approaching a target object. The infrared sensor connects to the processor chip via a signal line, and the processor chip adjusts the movement of the elbow joint based on the data from the infrared sensor. - **Angle Sensor**: Mounted on the rotation axis of the elbow joint to monitor the rotational angle of the elbow joint in real time. The angle sensor connects to the processor chip via a data bus, and the processor chip precisely controls the movement angle of the elbow joint based on the data from the angle sensor. - **Hip Joint** - **Temperature Sensor**: Similar to the shoulder joint, installed near the motor of the hip joint to monitor motor temperature, connecting to the processor chip via a signal line for overheating protection. At the same time, different chips and sensors' corresponding relationships and application scenarios are annotated on the schematic. --ar 1:1 --v 7 --stylize 100
素材来源:Midjourney中文版
Copyright©2017 Midjourney9.com All Right
Reserved 版权所有:成都金翼云科技有限公司 蜀ICP备2023008999号